




 1A 3.5V 42x42x20mm 4 Wires (17HS08-1004S)")
 2A 42x48mm 4 Wires compatible with 3D Printer/CNC")


 2.8A 3.2V 57x57x76mm 4 Wires (23HS30-2804S)")
 3A 3.36V 57x57x76mm 4 Wires CNC Stepping Motor")
 4.2A 57x57x114mm 4 Wires CNC Stepper Motor (23HS45-4204S)")


 1.5A 42x42x38mm 4 Wires")
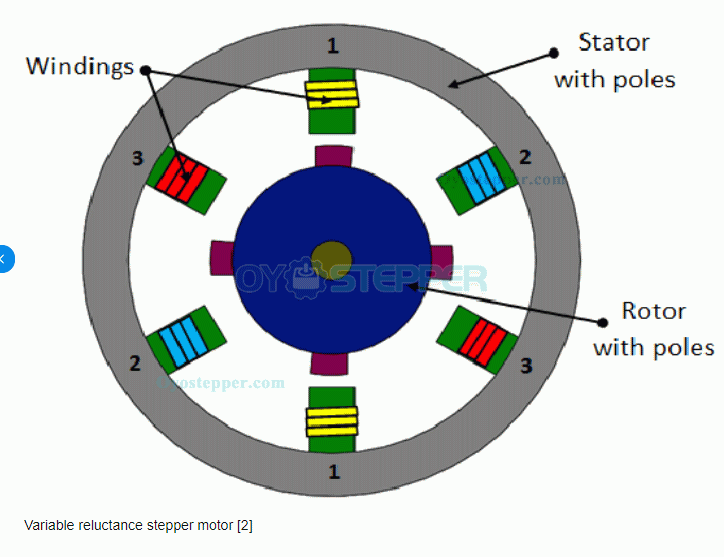
Structural characteristics and basic working principles of variable reluctance stepper motors
A variable reluctance stepper motor is an electromagnetic motor in which rotor position changes as the magnetic circuit seeks a lower reluctance path. Motion is produced by energizing stator phases in a defined sequence through an external drive circuit.
1) Structural elements
Stator assembly
The stator is built from a laminated magnetic core with multiple salient poles. Each stator pole set carries coils (windings). Housing features such as bearing seats support the shaft and maintain the air gap. Stator pole count and pole geometry are design parameters that determine step angle together with rotor tooth count.
Rotor assembly
The rotor is a toothed magnetic core made from ferromagnetic material. Permanent magnets are not required for the variable reluctance type. Rotor tooth count is selected relative to stator pole geometry to form discrete alignment positions.
Pole and tooth arrangement
The pole-to-tooth relationship defines the number of equilibrium positions per revolution. The distribution of stator poles, rotor teeth, and phase grouping affects step resolution, torque ripple, and the phase excitation sequence used by the driver.
Drive circuit interface
The motor requires a drive circuit that switches current through the phase windings according to a commutation table. The drive controls which phase is energized and when. Current direction and magnitude depend on the driver topology and the excitation mode used.
2) Operating mechanism (step generation)
Initial alignment
When one stator phase is energized, a magnetic field is established at the corresponding stator poles. The rotor moves toward an alignment position that reduces magnetic reluctance across the air gap.
Step transition
When the drive changes excitation from one phase to the next (or to a defined multi-phase combination), the magnetic field distribution shifts to a new set of stator poles. The rotor then moves toward the next 、alignment position. The mechanical step angle is determined by the stator and rotor geometry and the selected excitation sequence.
Continuous stepping
By repeating phase excitation changes at a commanded pulse rate, the rotor advances through a sequence of discrete positions. Direction is determined by the order of phase excitation. Speed is determined by the rate at which the drive advances the excitation sequence.
3) Integration context
Variable reluctance stepper motors are used as step-controlled rotary actuators in systems that implement position-indexed motion through an external controller and driver. Integration commonly appears in:
CNC motion axes using belt, gear, or screw transmissions
Automated manufacturing equipment using indexing and positioning functions
Instrument mechanisms using step-based adjustment assemblies
Robot subsystems that implement step-commanded axes within a larger machine structure
System behavior depends on motor geometry, driver current regulation method, supply voltage, load inertia, friction, and the motion profile used by the controller.
A vr stepper motor requires an external driver and a controller that provides step commands or an equivalent control interface supported by the driver.
Step angle and torque characteristics depend on the stator/rotor tooth geometry and the excitation method stated for the motor and driver.
Previous:Tips on How to Choose a Brushless DC Motor
